IsoGami: Rigid-Deployable Kirigami Materials From Isohedral Tilings
ACM SIGGRAPH 2026 Conference Papers
Videos
Submission Video
Abstract
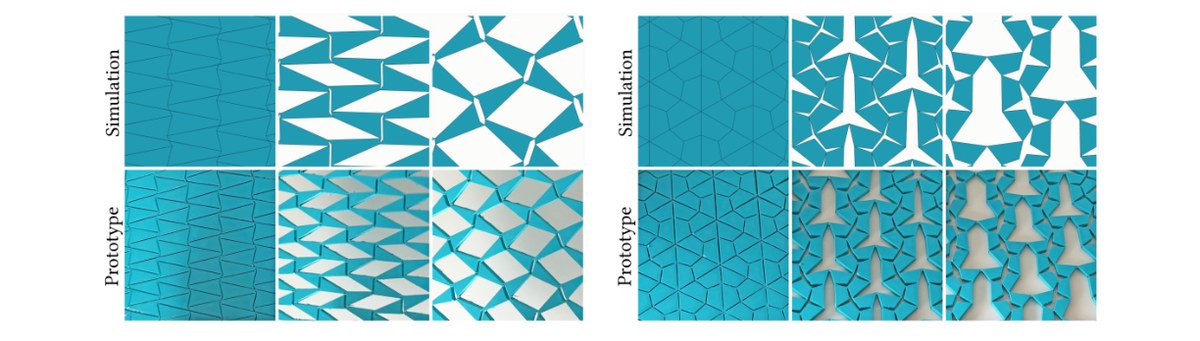
Rigid-deployable Kirigami sheets are unique mechanical structures, enabling extreme expansion with minimal elastic deformation. Furthermore, they unfold in fluid and coordinated motions which reveal interesting geometric patterns. Thanks to their tunable expansion behaviour, Kirigami-like structures have found a wide range of applications at various scales. However, finding the right geometry for a given application remains a significant challenge due to the complex relationship between cut patterns and deployment behavior. In this work, we introduce a computational approach to explore the design space of rigid-deployable Kirigami sheets defined over isohedral tilings, a class of periodic patterns constructed from identical polygonal tiles. Our method explores the mixed discrete-continuous design space formed by joint topologies and tile shape parameters. Leveraging tools from linkage analysis, we identify self-deployable designs with a single kinematic degree of freedom. To compute the corresponding deployment motions, we extend the concept of nonlinear compliant modes to the multi-body setting, incorporating collision handling to ensure feasible designs. Our approach enables the discovery of diverse isohedral Kirigami sheets with varying topologies, tile shapes, and expansion behavior. We showcase our results through an interactive material browser and validate selected designs with 3D-printed prototypes.
BibTeX
@article{Han26Isogami,
title = {IsoGami: Rigid-Deployable Kirigami Materials From Isohedral Tilings},
author = {Han, Guo and Montes Maestre, Juan Sebastian and Numerow, Logan and Hinchet, Ronan and Coros, Stelian and Thomaszewski, Bernhard},
journal = {ACM SIGGRAPH 2026 Conference Papers},
year = {2026}
}